| Quantity: | |
|---|---|











测试系统 (1)")
The real-time dynamic control system of the high-speed motor test bench can realize the speed and torque control through the real-time controller and simulate the actual load. The main control system can communicate with the environmental chamber, power analyzer, cooling system, EUT, etc., and realize control. The data acquisition system collects signals from torque sensors, vibration sensors, temperature sensors, pressure sensors, and other sensors, and transmits them to the main control system at a high speed. The sensor data can be displayed, saved and processed in the software interface.
The high-speed and high-power motor test bench (test system) can be used in various high-speed motor applications such as new energy vehicle drive motors, high-speed air compressor motors, and high-speed magnetic levitation motors. The installation platform can be designed according to the motor to be tested, and the end flange installation structure or the base installation structure can be selected.
Select the dynamometer according to the characteristic curve of the motor to be tested. The dynamometer is generally controlled by a four-quadrant inverter and can work in electric or power generation. The system can be equipped with high and low temperature environment chambers, battery simulators or DC bidirectional power supplies, and power analysis Instrument, cooling system and other accessories.
The recommended dynamometer parameters are as follows:

Note: E—with environmental compartment (optional)
P—With battery simulator or DC two-way power supply (optional)



The small high-speed motor test bench (test system) is used to test low-power high-speed motors. It is mainly used for low-power aviation generators, robot motors, small high-speed compressor motors, machine tool spindle motors, etc. Motor test. The installation platform can be designed according to the motor to be tested, and the end flange installation structure or the base installation structure can be selected.
Select the dynamometer according to the characteristic curve of the motor to be tested. The dynamometer is generally controlled by a four-quadrant inverter and can work in electric or power generation. The system can be equipped with high and low temperature environment chamber, battery simulator or DC bidirectional power supply, low power Adjustable DC power supply, power analyzer, cooling system and other accessories. According to users' requirements for noise, water-cooled dynamometer or air-cooled dynamometer can be selected,
The recommended dynamometer parameters are as follows:
Parameter table of air-cooled dynamometer:

Parameter table of water-cooled dynamometer:



The ultra-high-speed motor test bench (test system) is used to test high-speed motors with a speed above 60,000 rpm, and is generally used in fields such as high-speed compressor motors. Our company can provide a high-speed motor test bench with a speed of 165000rpm.
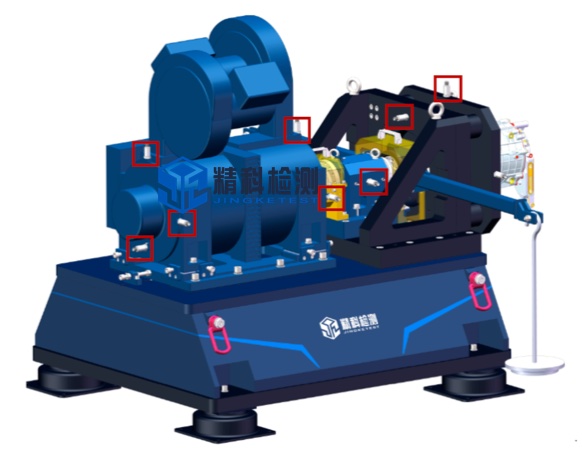
The ultra-high-speed motor test system is composed of dynamometer, dynamometer driver, braking resistor, speed increasing box, DC power supply, power analyzer or power meter, control system, mechanical system, sensor measurement system and other parts.


1. Test bench bottom plate
2. Dynamometer part
3. Coupling between dynamometer and gearbox
4. High-speed gearbox
5. High-speed coupling, including the test piece support of the protective cover
6. Test piece
The mechanical structure of the test bench includes: test bench base, dynamometer installation base, bearing support, test piece installation tooling, locked-rotor mechanism, test piece connecting shaft, etc.
The base of the test bench adopts integral casting structure. The upper surface of the base is the assembly surface. After precision processing, four air spring shock absorbers are installed at the bottom of the base for shock isolation and shock absorption.
The ultra-high-speed gearbox adopts a two-stage power distribution gearbox with coaxial input and output shafts. The parameters are as follows:
1. Rated output speed: 165,000 rpm
2. Rated output torque: Tout, rated = 1.5 Nm
3. Rated power Pnom = 25 kW
4. The service life of all gearbox components> 10,000 hours

As a key component of the ultra-high-speed gearbox system, the lubrication pumping station is extremely important. The pumping station is provided by the ultra-high-speed gearbox supplier at the same time, and joint adjustment is carried out before leaving the factory.
The torque measurement of the test piece adopts a direct measurement method, instead of installing the torque speed sensor on the low-speed end to measure, avoiding the transmission loss of the high-speed gearbox into the measurement data of the test piece motor.
In order to facilitate the user to test different specimens, to facilitate the replacement of the connection tooling, and to avoid the torsional vibration of the shaft system, a torque flange, a transitional spline flange, and a spline are installed between the output end of the bearing housing and the input shaft of the motor under test. axis.